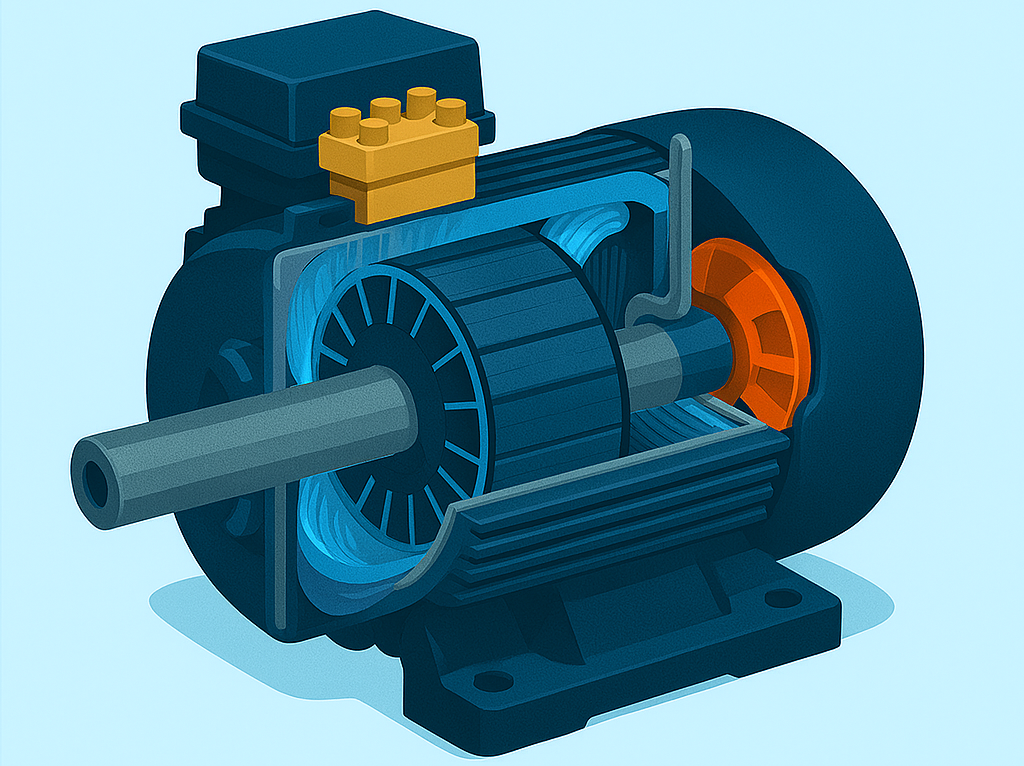
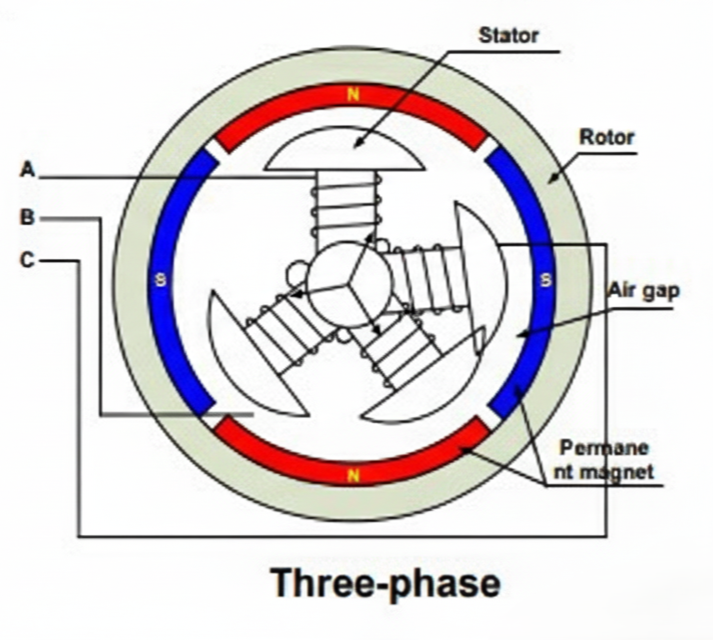
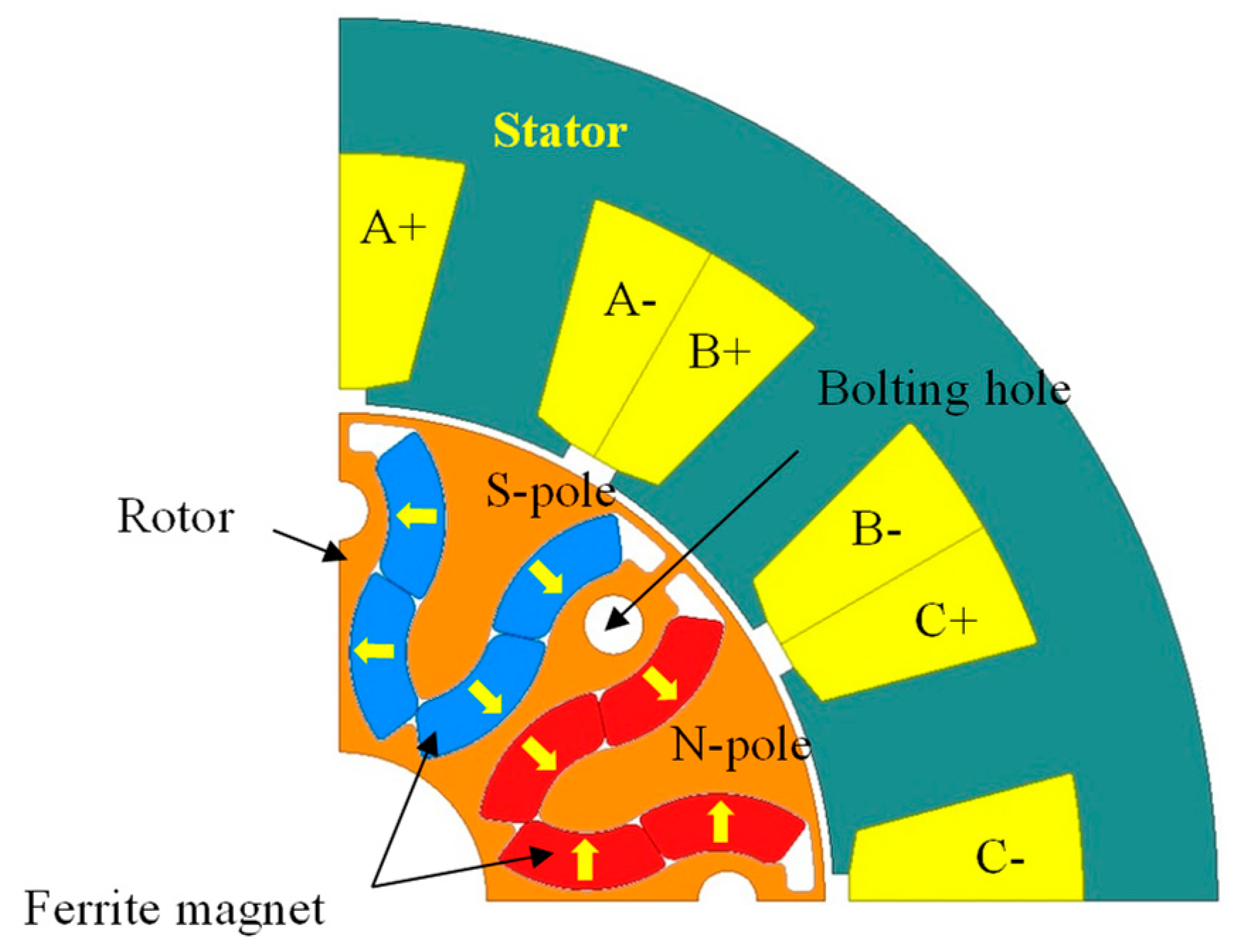
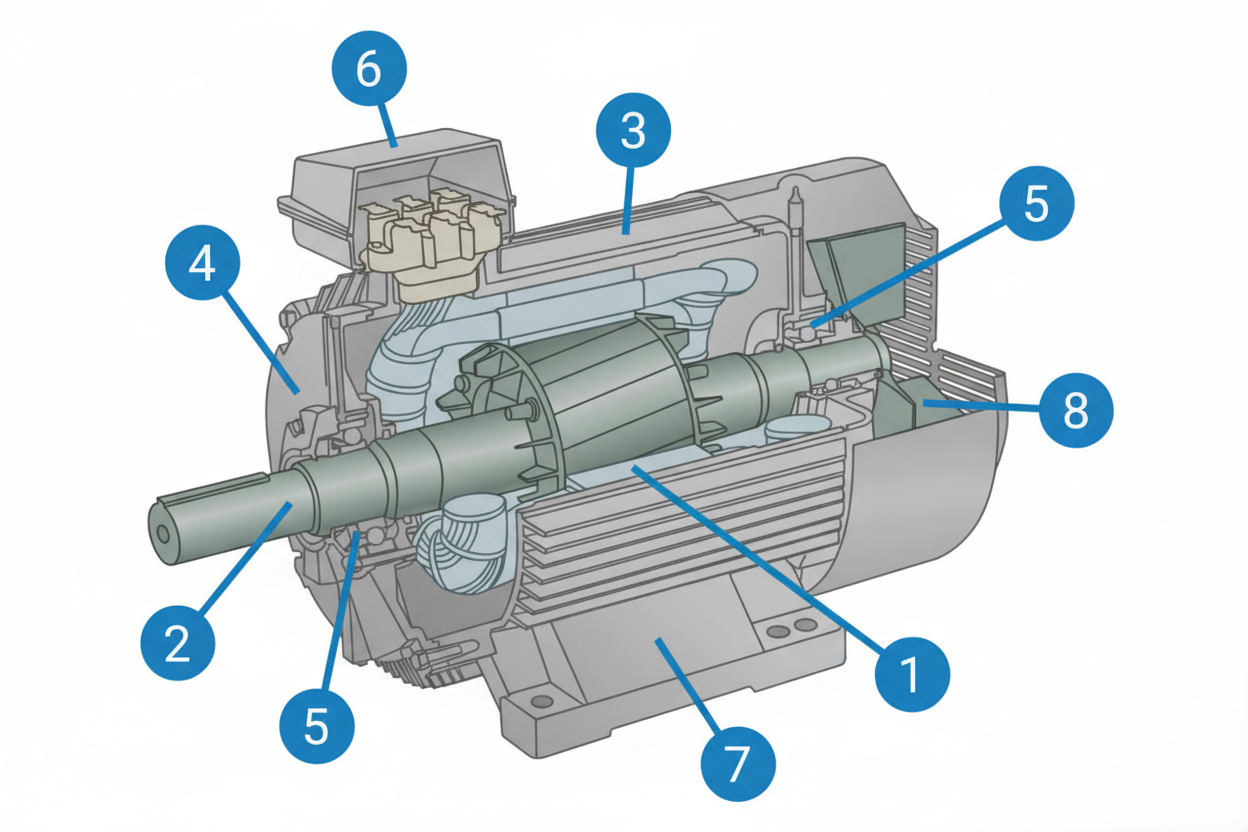
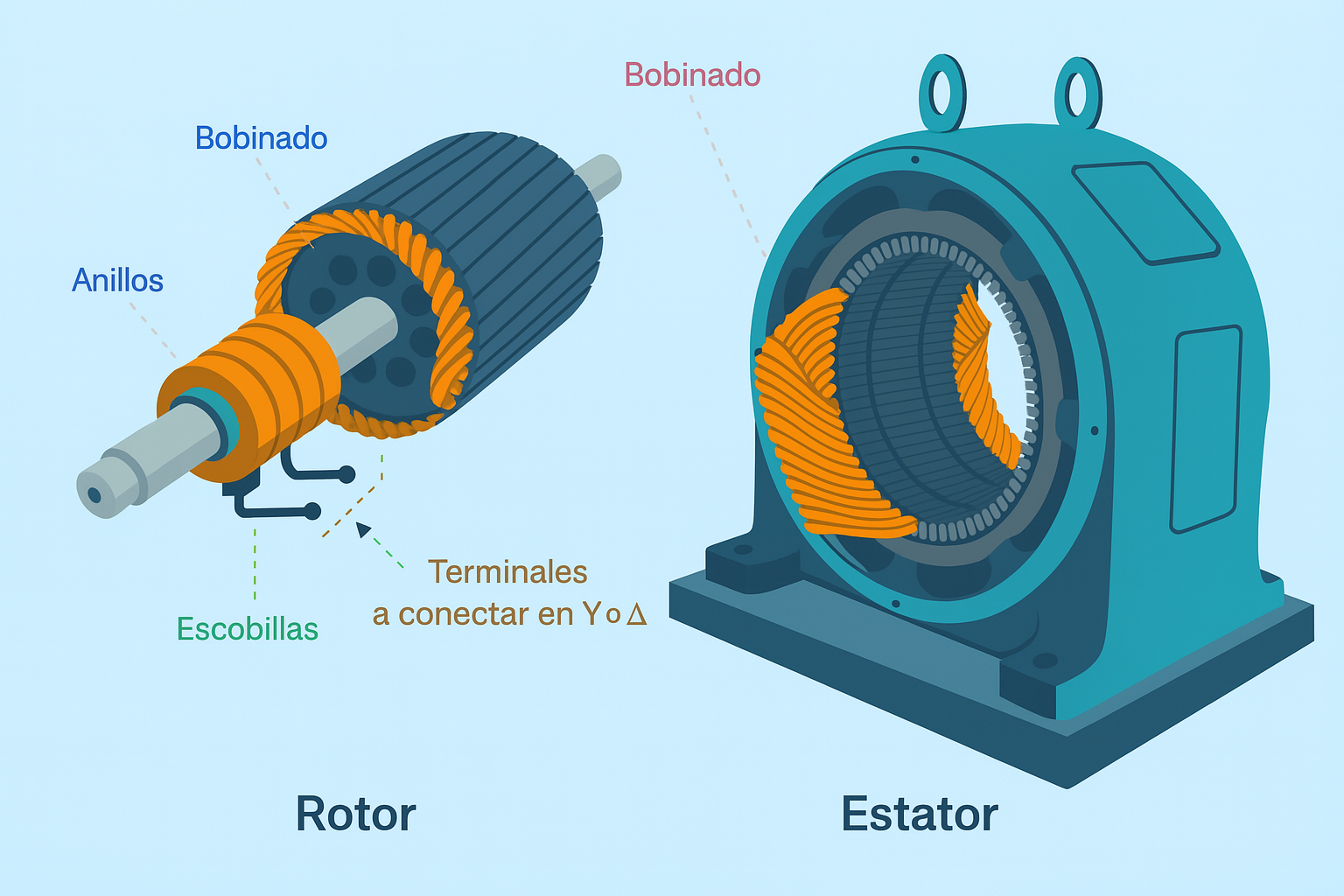
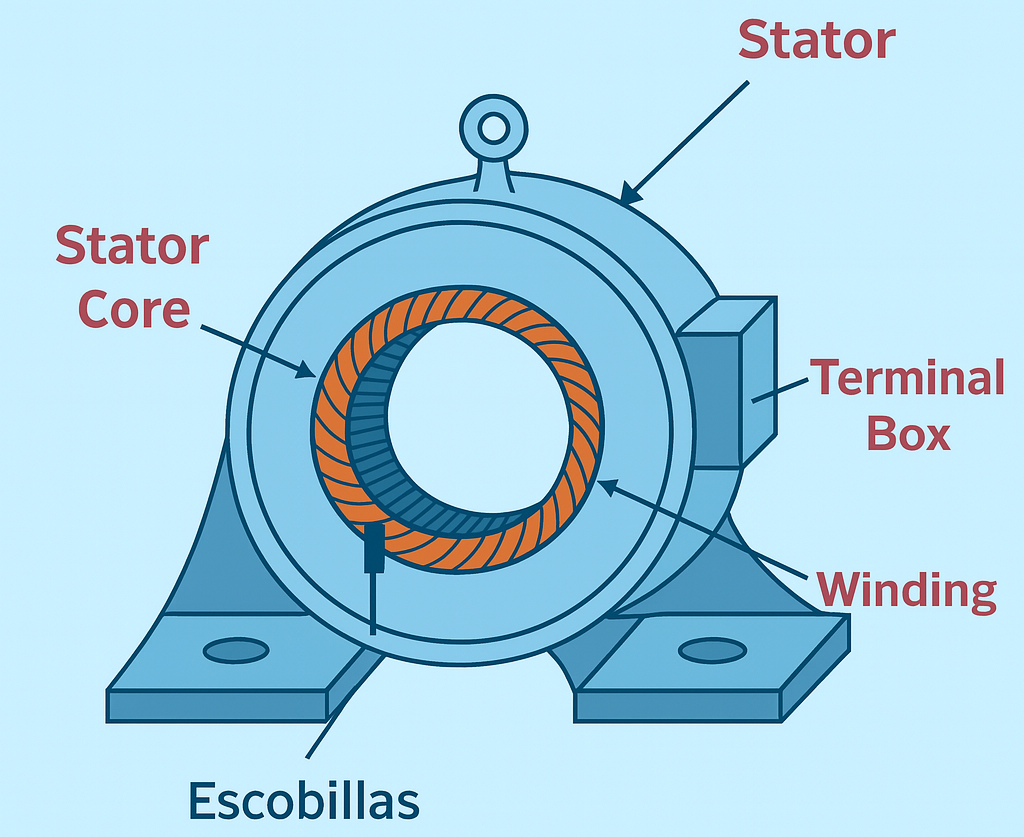
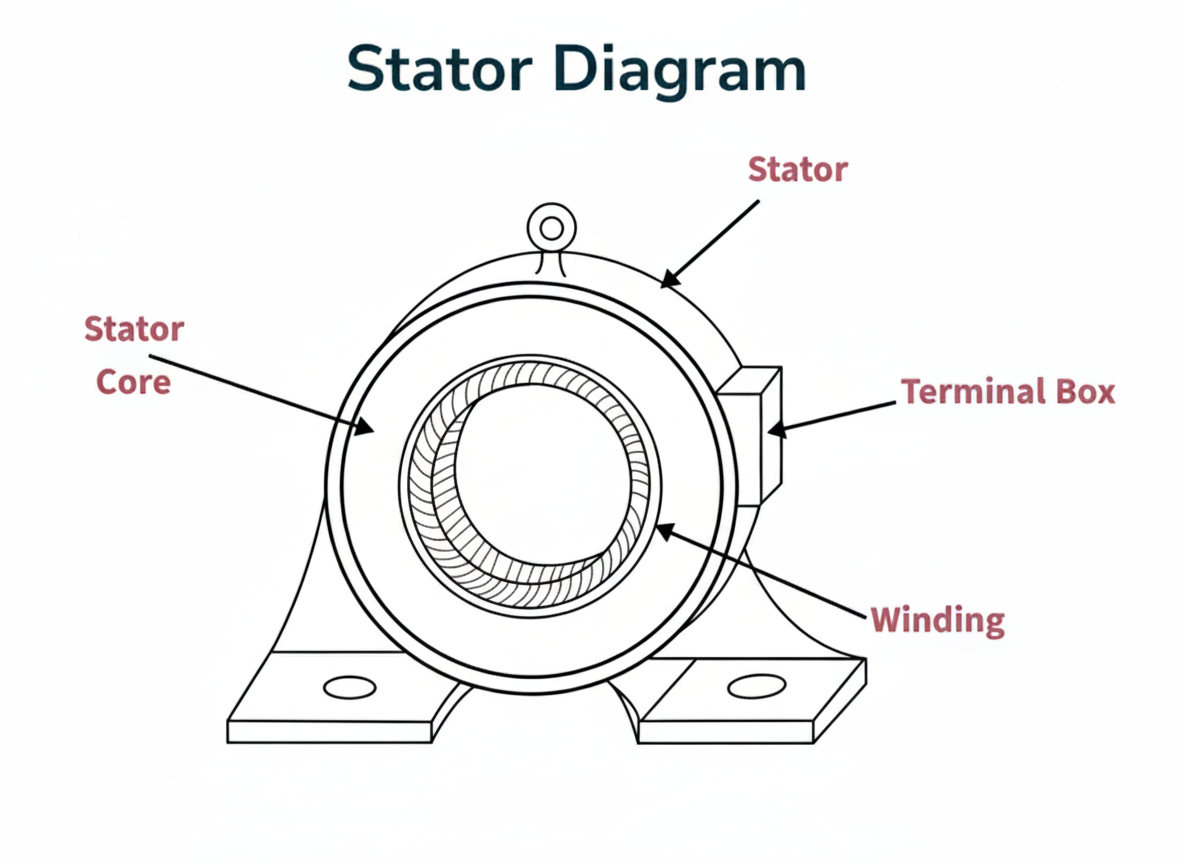
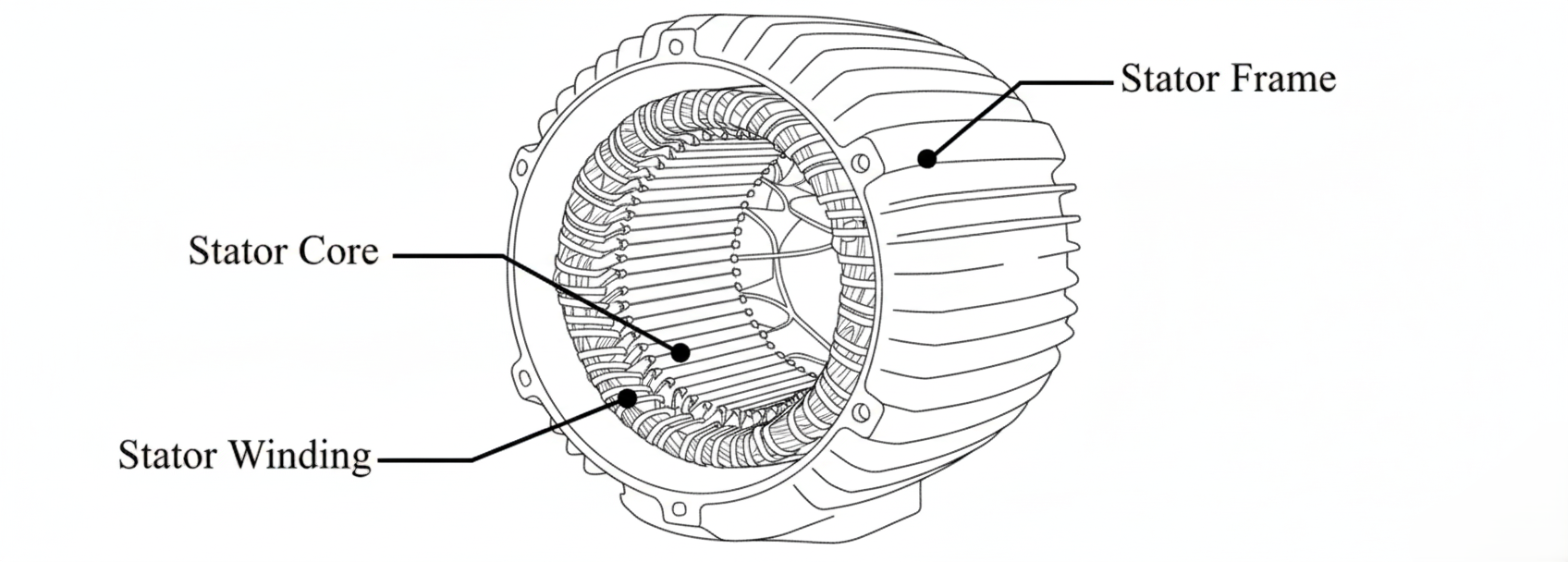
استاتور
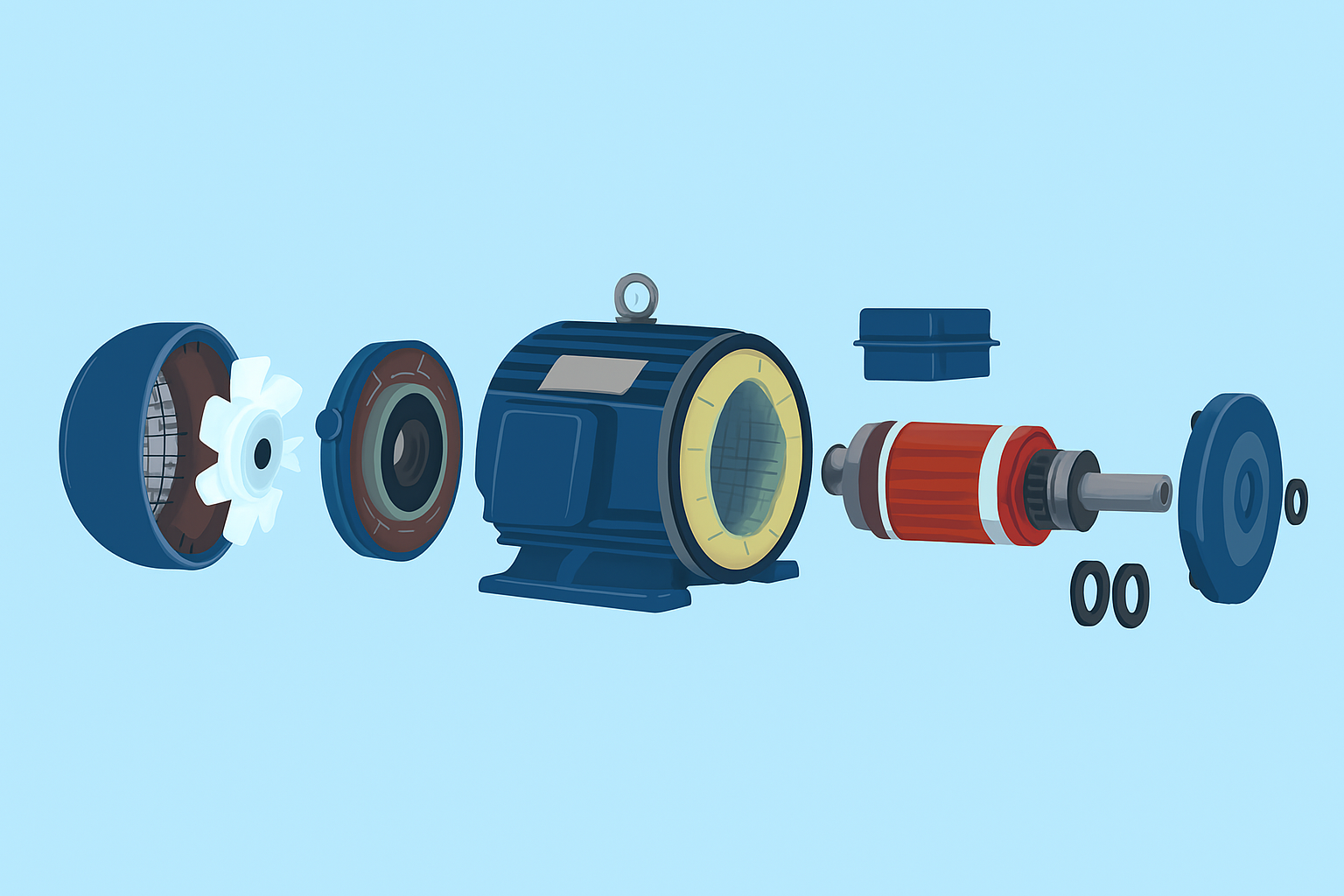
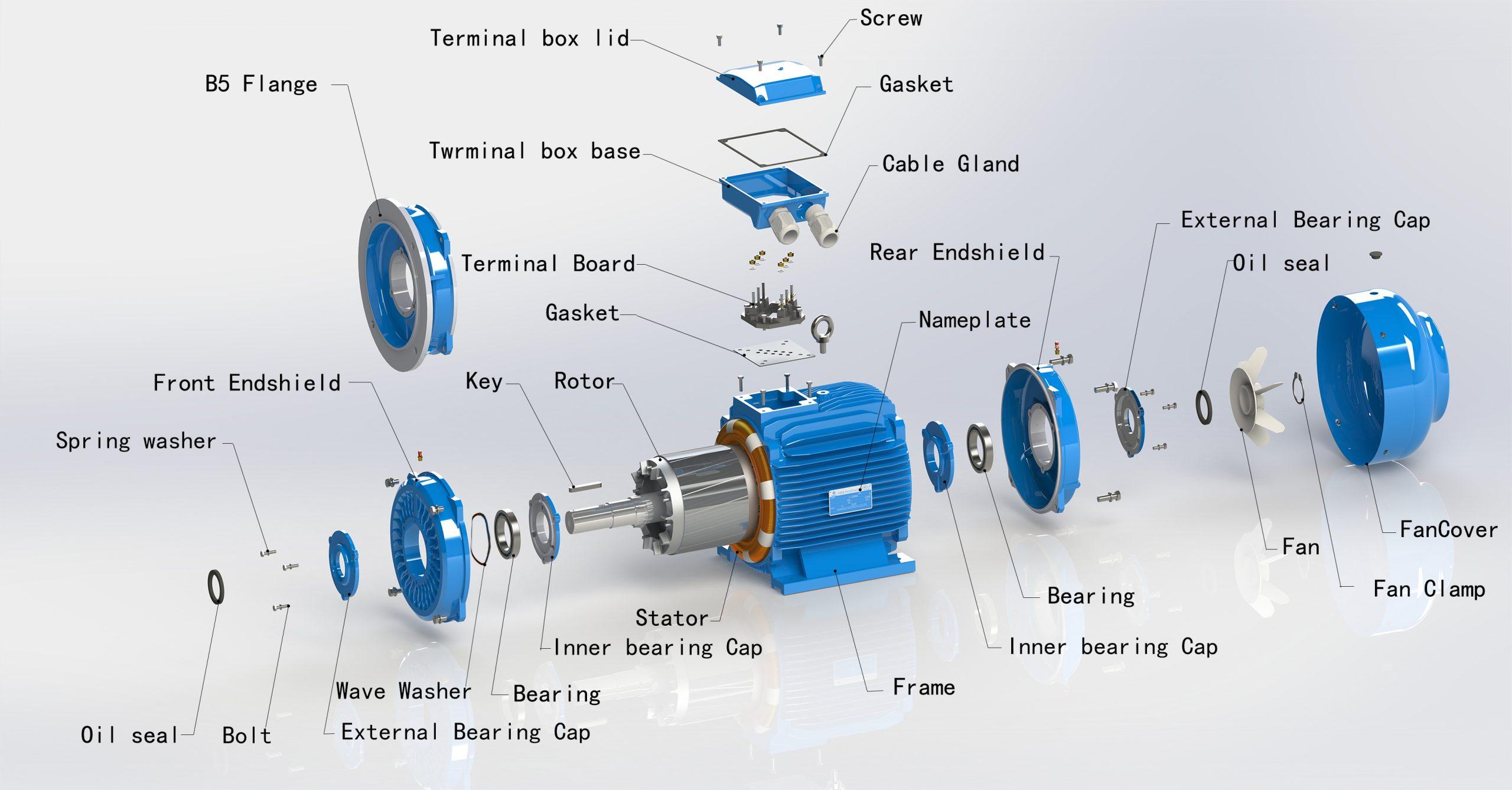
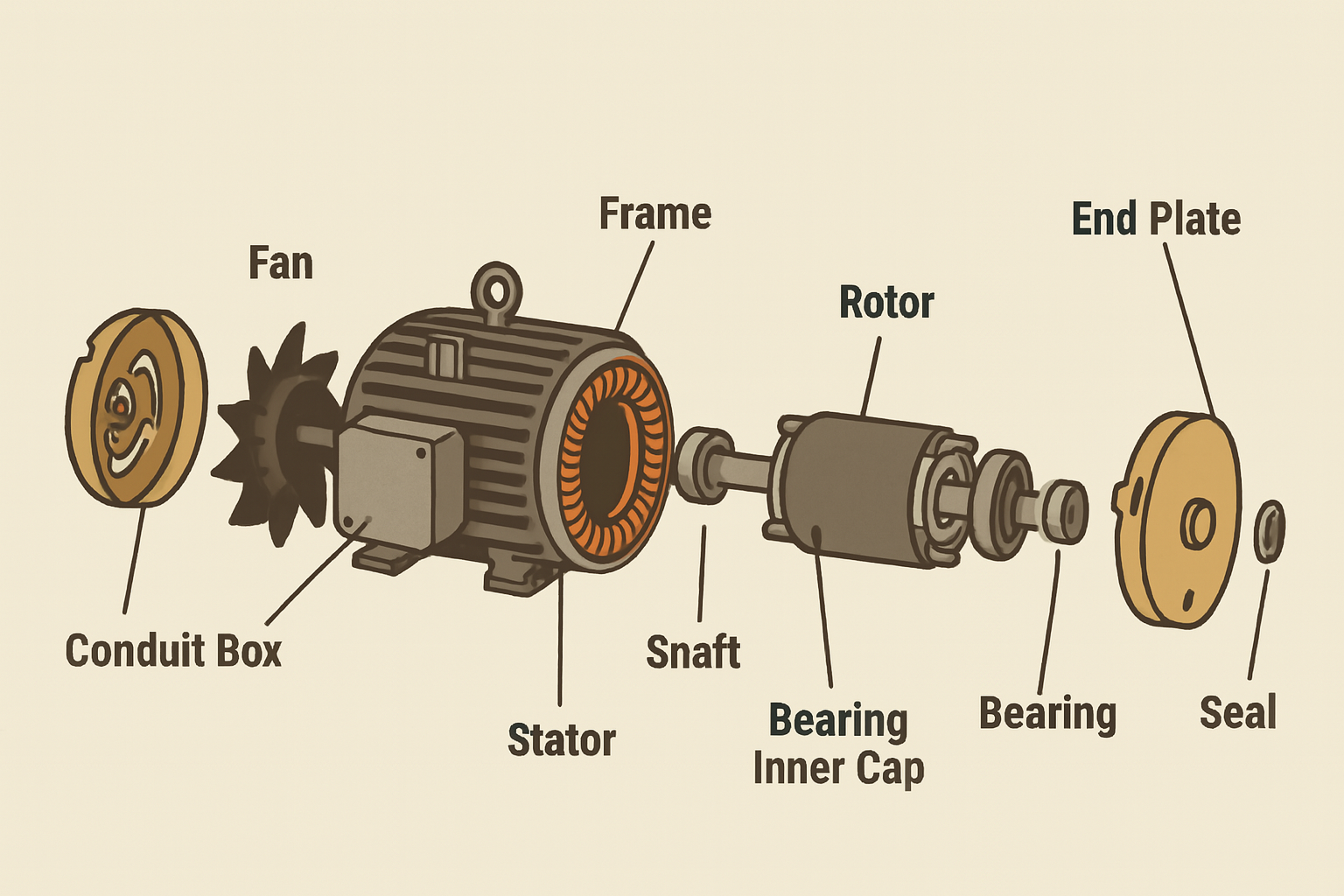
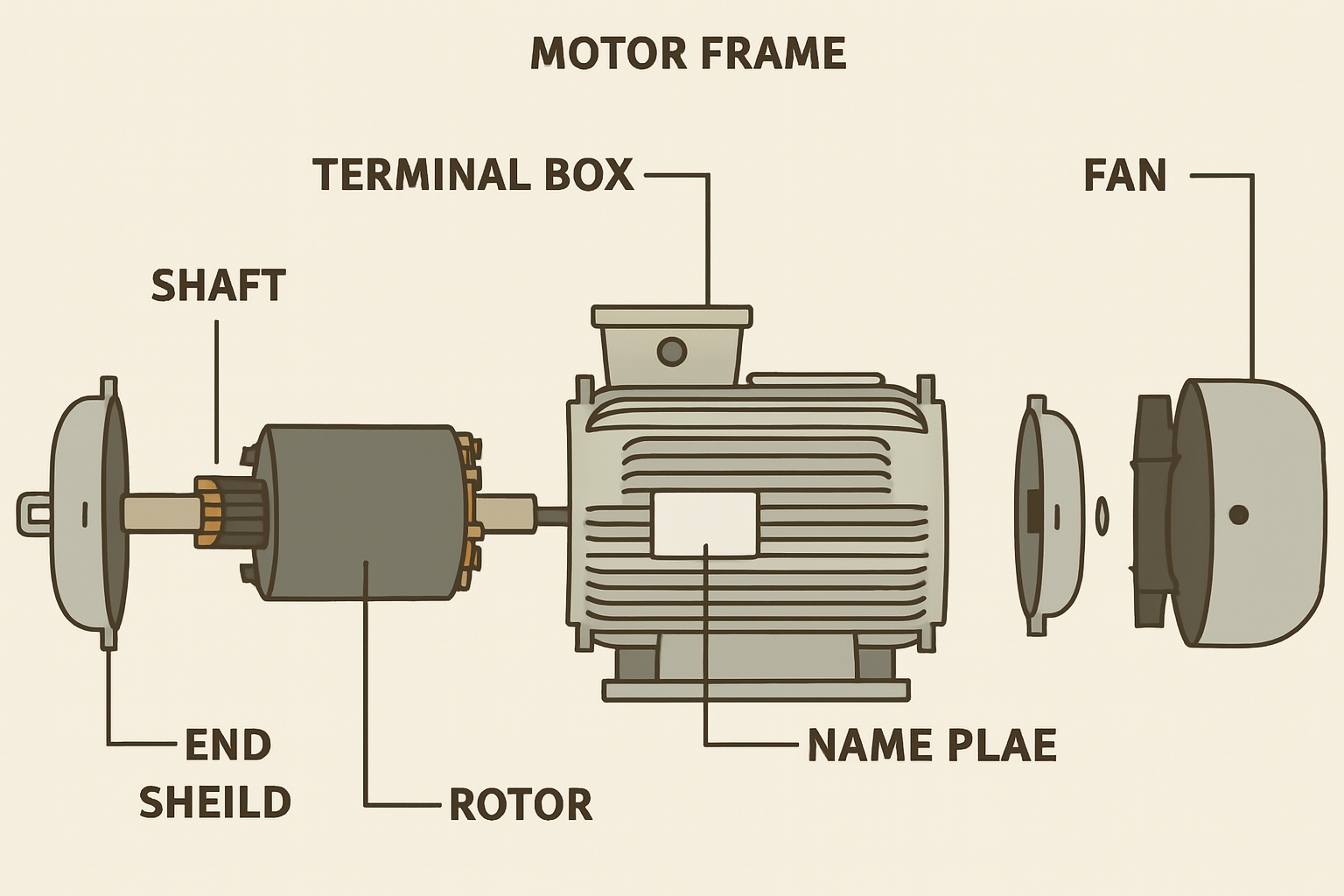
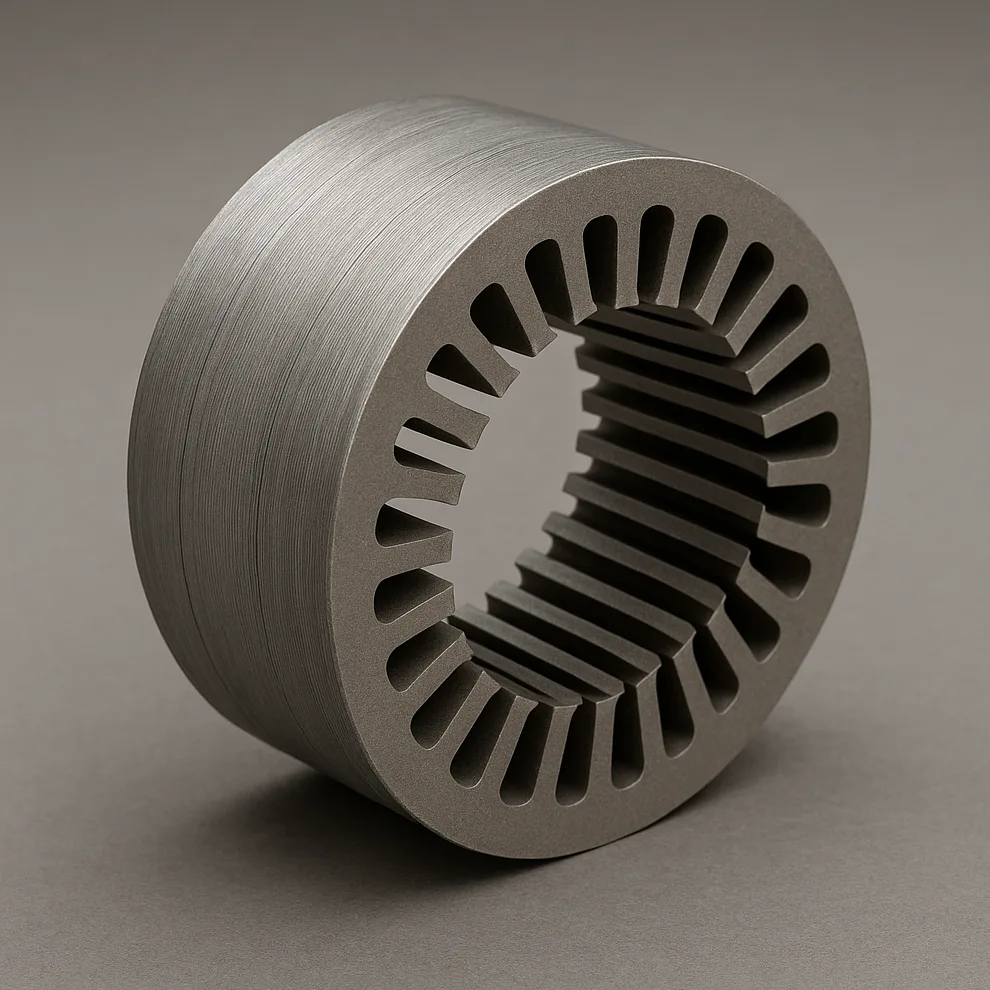
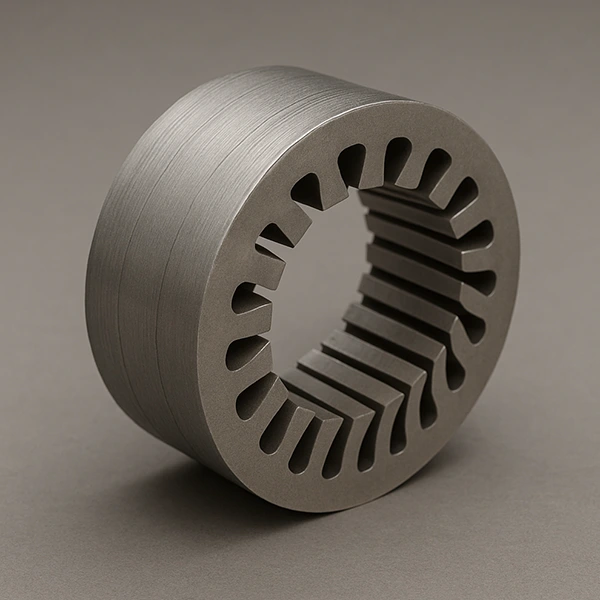
استاتور بخش ثابت دستگاه است که شامل قاب استاتور و ورقهای فولادی و غیره میشود.
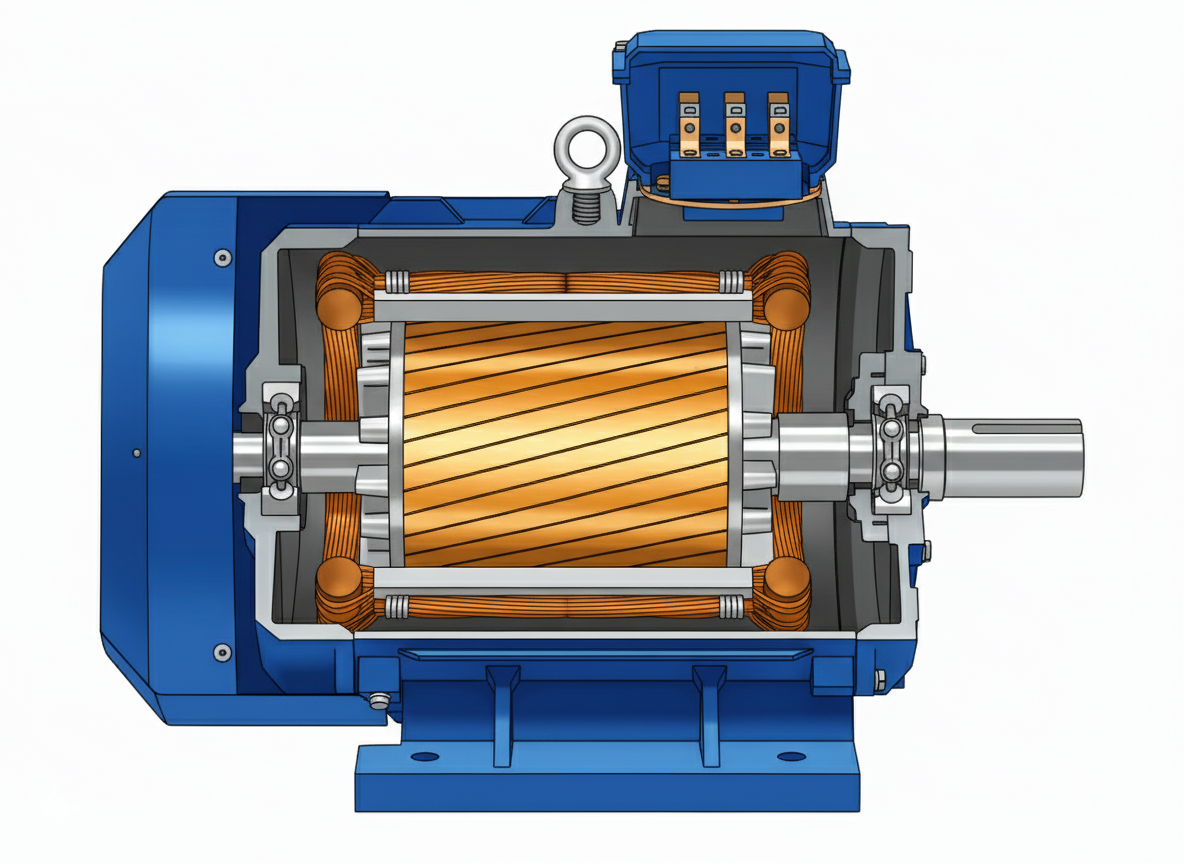
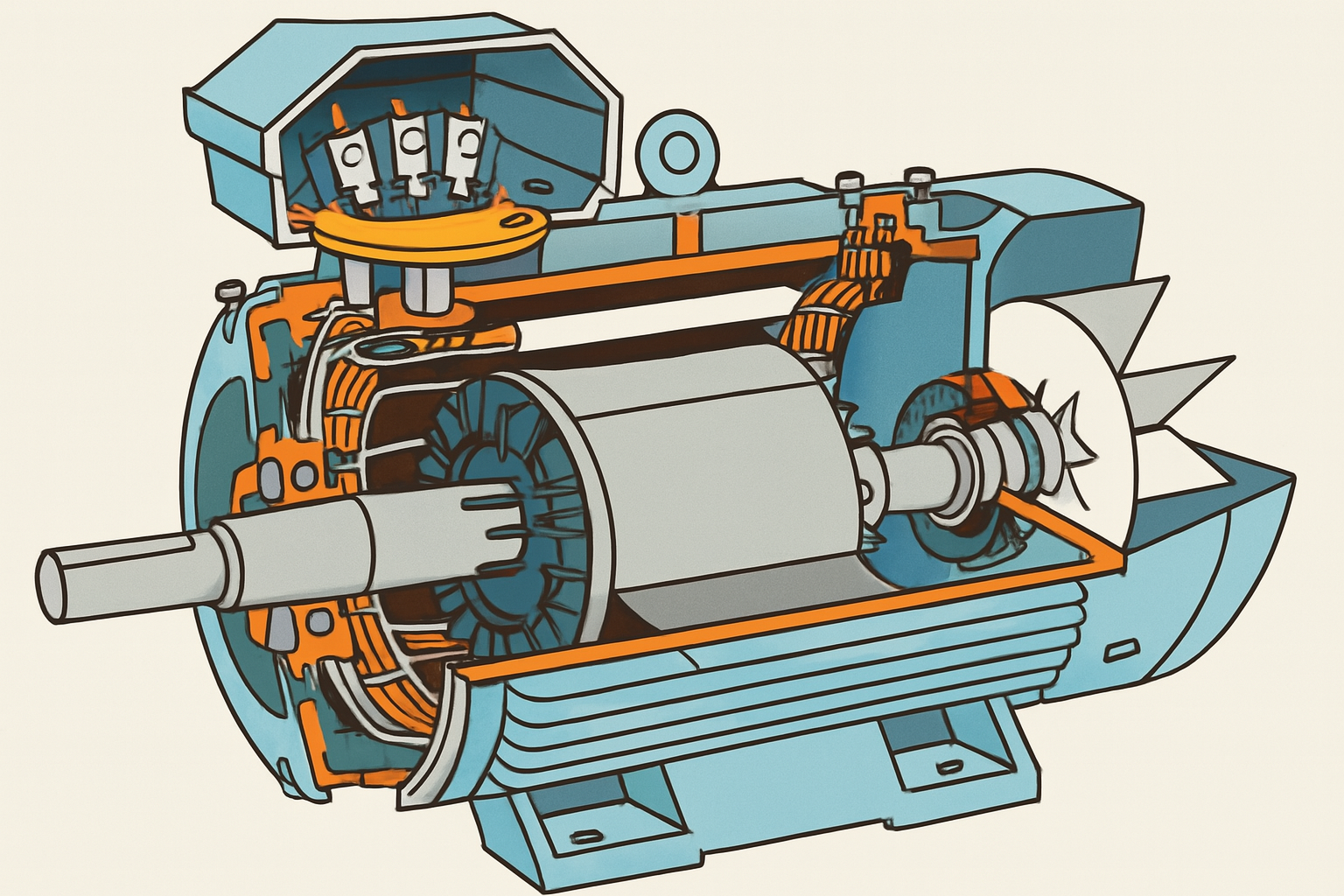
قاب استاتور برای نگهداشتن ورقهای آرماتور و سیمپیچی استاتور در محل خود استفاده میشود.
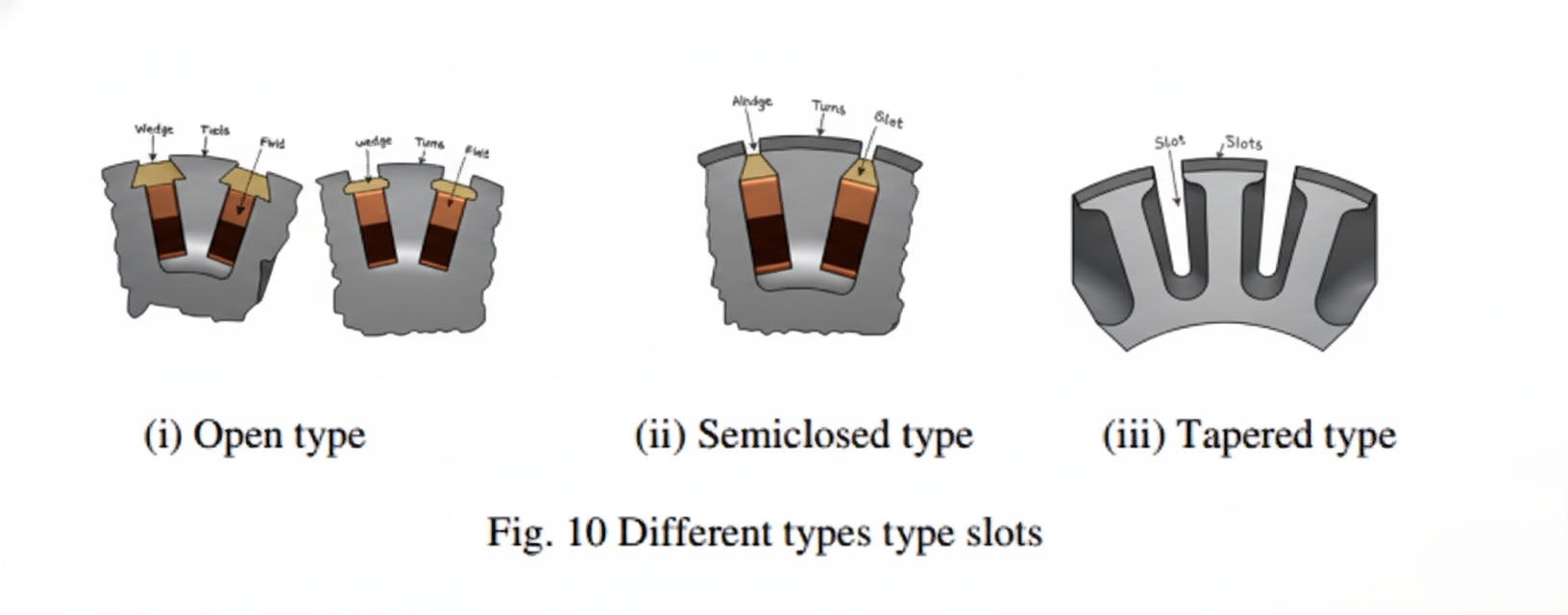
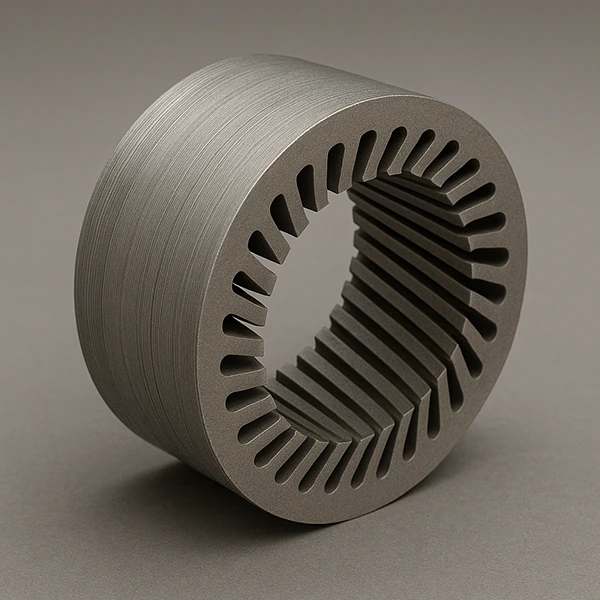
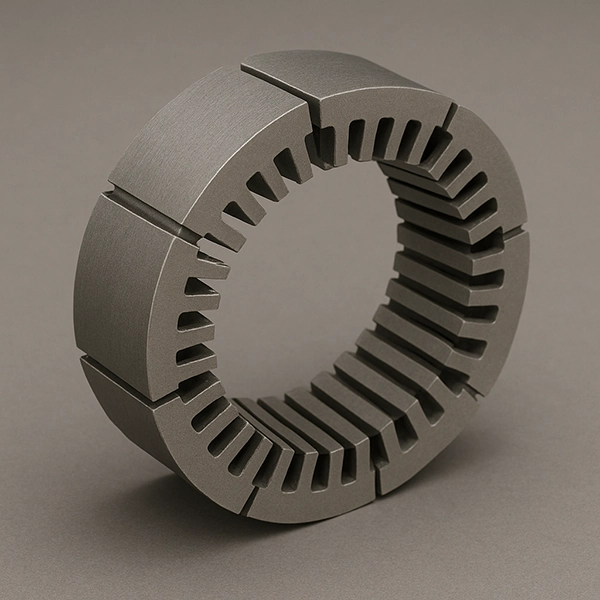
بسته به ظرفیت، برخی سوراخها برای گردش هوا و خنکسازی در قاب ایجاد یا ریختهگری میشوند. در قابهای بزرگ، کانالهای افقی و عمودی برای گردش هوا و دفع حرارت، یعنی برای اهداف خنکسازی، طراحی میشوند. ورقها از فولاد سیلیکونی ساخته شدهاند. هر لایه ورق با استفاده از لایههای کاغذی، پوشش وارنیش یا پوشش اکسیدی از یکدیگر عایقبندی میشود. تعداد زیادی شیار در ورقها برای نگهداری سیمپیچیها تعبیه میشود. این شیارها از انواع مختلف هستند:
شیار باز (Open Type) که از بالا به پایین باز است، شیار نیمهبسته (Semi-Closed) که بازشدگی کوچکی دارد، و شیار بسته (Closed) که کاملاً بسته است، همانطور که در شکل نشان داده شده است.
شیارهایی که در محیط داخلی ورقها برش داده میشوند، عموماً از نوع شیارهای باز یا نیمهبسته هستند. سیمپیچی در این شیارها قرار میگیرد و هادیها بهوسیله فیبر یا گوههای بامبو در محل خود ثابت میمانند.
شکلهای مختلف شیار:
بسته (Closed)
نیمهبسته (Semi-Closed)
باز (Open)